Contexte
La détection, classification et la caractérisation de la végétation en milieu urbain est une étape cruciale afin d’être en mesure d’analyser et de suivre les démarches et les politiques de végétalisation urbaine. En effet, à l’aide de la technologie LiDAR on va pouvoir faire un état des lieux de la végétation en ville avant de pouvoir faire des aménagements nécessaires pour faire face au changement climatique.
Projet
Grâce au programme LiDAR HD de l’IGN (Institut national de l’information géographique et forestière), on peut acquérir des données LiDAR en open data. Une fois l’acquisition faite, on a un nuage de points brut qui ne nous permet pas encore de tirer des MNT/MNS/MNH (qui nous permettent de décrire précisément le sol). Donc pour avoir cette information-là, on est obligé de classifier le nuage de points, ce qui signifie, en termes simples, prendre chaque point du nuage et lui attribuer une classe.
Méthodologie
Croisement de données avec BD ORTHO : afin d’optimiser au maximum cette classification, je vais utiliser des orthophotographies IR de sorte à bien isoler la végétation.
Démarche
De manière à mieux visualiser la végétation contenue dans la zone d’étude, l’image satellitaire de Grenoble a été chargée dans ArcGIS Pro (Figure 1) :
 Figure 1. Image satellitaire de Grenoble.
Figure 1. Image satellitaire de Grenoble.
Puis, j’ai téléchargé l’orthophotographie IRC recouvrant la zone sur le site de l’IGN et j’ai changé par la suite l’ordre des bandes pour permettre de faire ressortir la végétation (Figure 2) :
 Figure 2. Orthophotographie de la zone d’étude.
Figure 2. Orthophotographie de la zone d’étude.
Ensuite, étant donné que mon seul but est de classer la végétation et non pas les autres objets géographiques, j’ai procédé à faire un NDVI pour extraire la végétation et puis à faire un seuillage en fonction des valeurs spectrales des pixels correspondant à la végétation (Figure 3) :
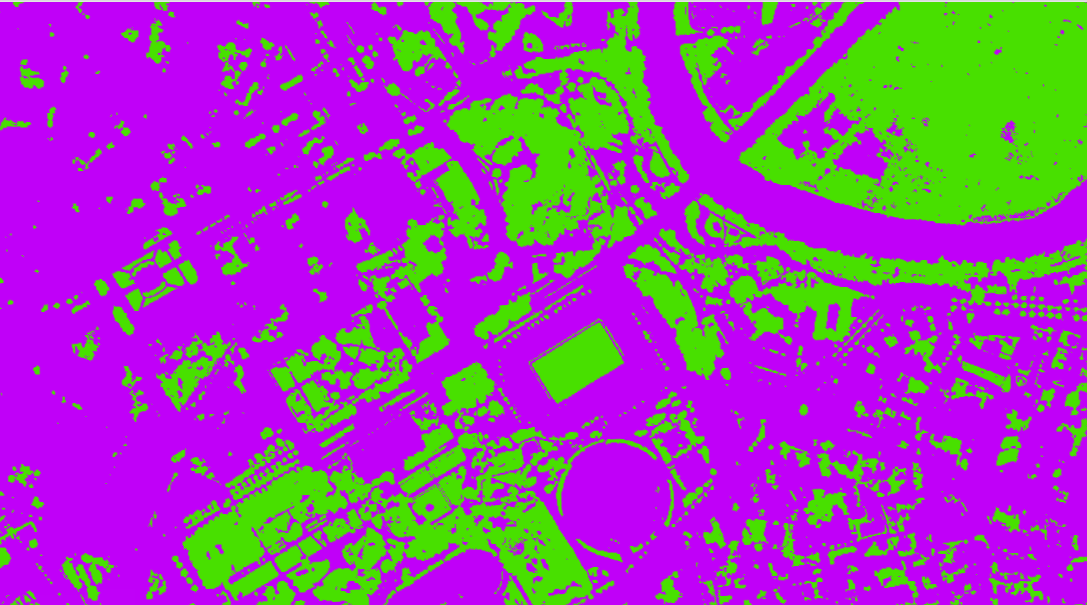 Figure 3. Seuillage de la végétation de Grenoble.
Figure 3. Seuillage de la végétation de Grenoble.
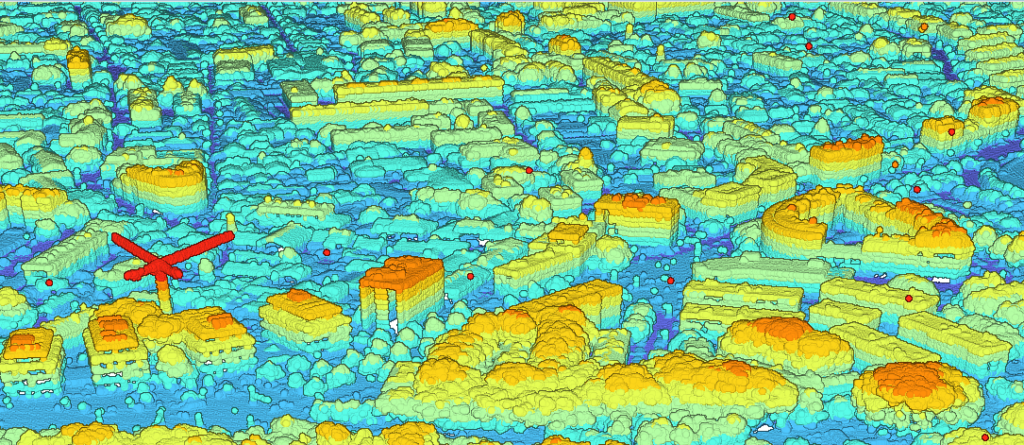
Enfin, j’ai utilisé un outil qui sert à classifier à partir d’un raster de sorte à injecter cette extraction au nuage de points LiDAR (Figure 4 et Figure 5) :
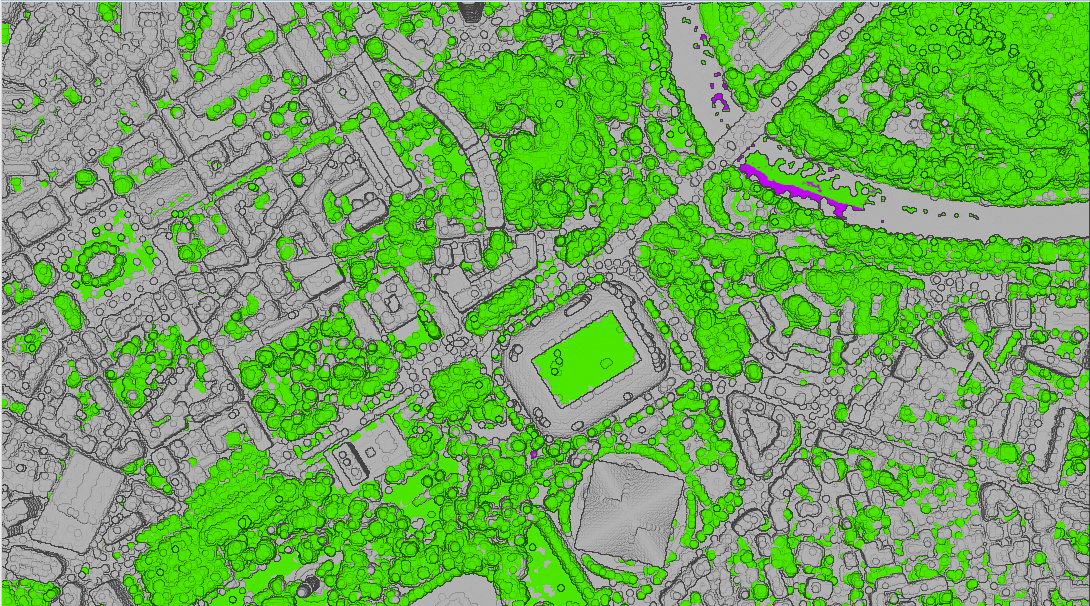 Figure 4. Végétation dans le nuage de points LiDAR de Grenoble.
Figure 4. Végétation dans le nuage de points LiDAR de Grenoble.
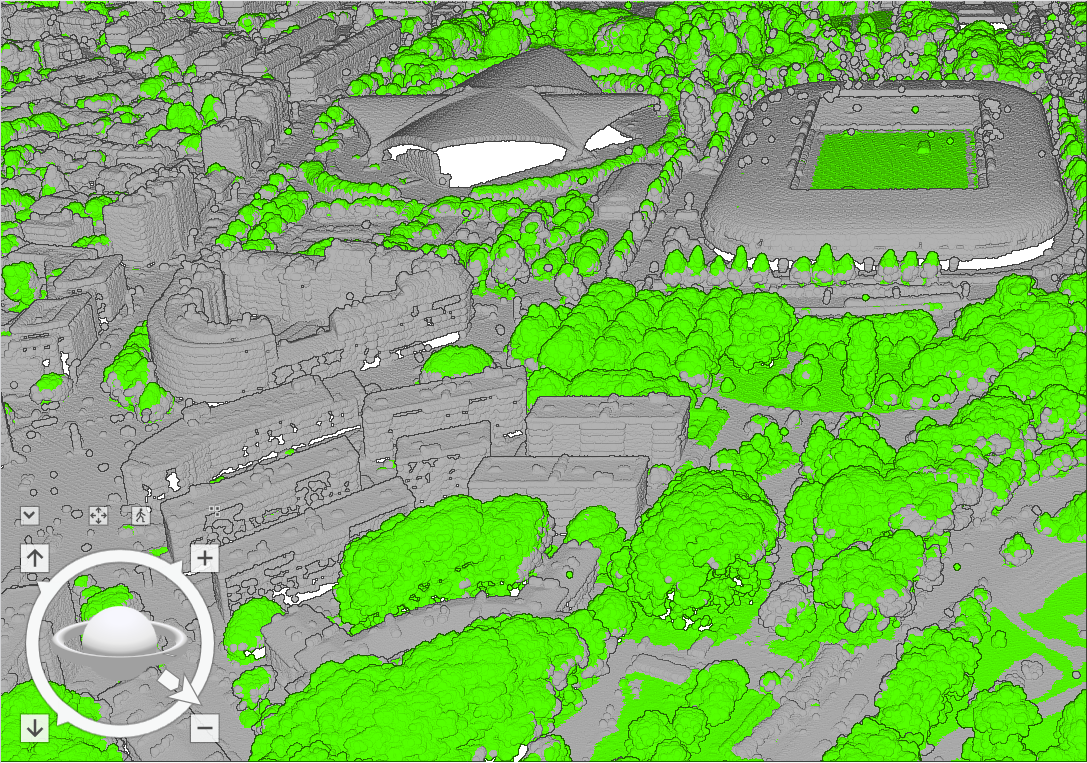 Figure 5. Vue 3D de la végétation dans le nuage de points LiDAR de Grenoble.
Figure 5. Vue 3D de la végétation dans le nuage de points LiDAR de Grenoble.
Résultats
Le but étant de classifier la végétation, on peut considérer que c’est une méthode accomplie. Toutefois, ce n’est pas une méthode rapide ni automatique. En effet, elle nécessite plusieurs étapes pour aboutir à un résultat. Il reste désormais la classification de la strate végétale qui peut être faite en fonction de la hauteur — pas envisageable car l’algorithme séparera, par exemple, un arbre en plusieurs strates alors qu’il ne s’en agit que d’un — ou via un autre un algorithme en fonction de plusieurs variables telles que la hauteur, les longueurs d’onde, la proximité, etc. Ainsi, ce projet s’inscrit dans une continuité, les perspectives sont nombreuses et pourraient faire l’objet d’un nouveau projet.