Context
The detection, classification and characterization of vegetation in an urban environment is a crucial step in order to be able to analyze and monitor urban revegetation procedures and policies. Indeed, using LiDAR technology, we will be able to take stock of the vegetation in the city before being able to make the necessary adjustments to deal with climate change.
Project
Thanks to the LiDAR HD program of the IGN (National Institute for Geographic and Forest Information), it is possible to acquire LiDAR data in open data. Once the acquisition has been made, we have a raw point cloud which does not yet allow us to draw DTMs/DTMs/DTMs (which allow us to describe the ground precisely). So to get that information, we have to classify the point cloud, which means, in simple terms, taking each point in the cloud and assigning it a class.
Approach
Data crossing with BD ORTHO: in order to optimize this classification as much as possible, I will use IR orthophotographs so as to properly isolate the vegetation.
Process
In order to better visualize the vegetation contained in the study area, the satellite image of Grenoble was loaded into ArcGIS Pro (Figure 1):
 Figure 1. Satellite image over Grenoble.
Figure 1. Satellite image over Grenoble.
Then, I downloaded the IRC orthophotography covering the area on the IGN website and I subsequently changed the order of the strips to allow the vegetation to stand out (Figure 2):
 Figure 2. Orthophotography of the study area.
Figure 2. Orthophotography of the study area.
Then, since my only goal is to classify the vegetation and not the other geographical objects, I proceeded to do an NDVI to extract the vegetation and then to classify according to the spectral values of the pixels corresponding to the vegetation (Figure 3):
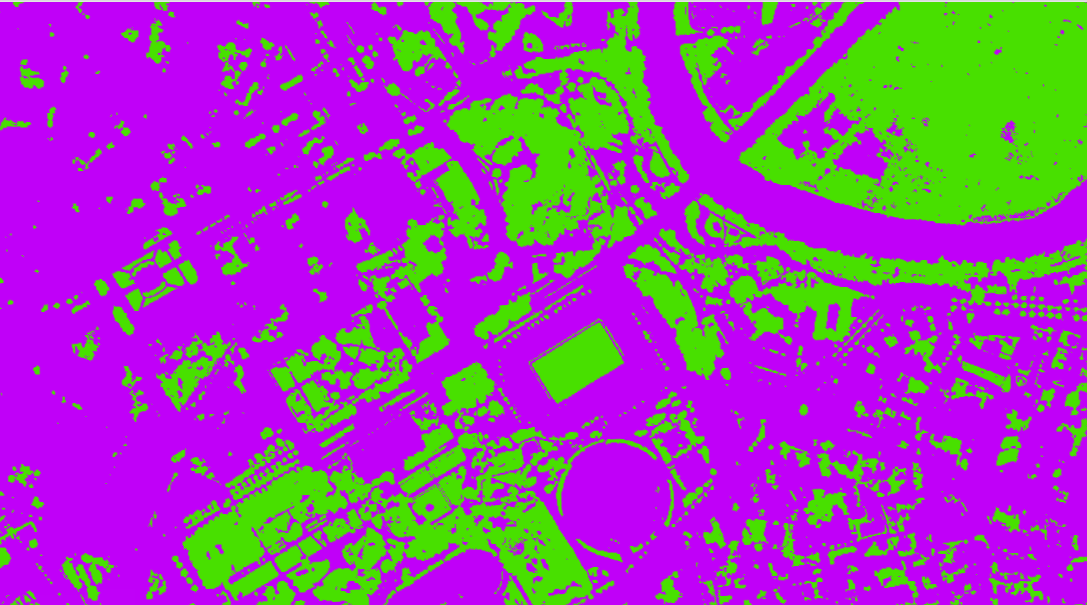 Figure 3. Grenoble vegetation classification.
Figure 3. Grenoble vegetation classification.
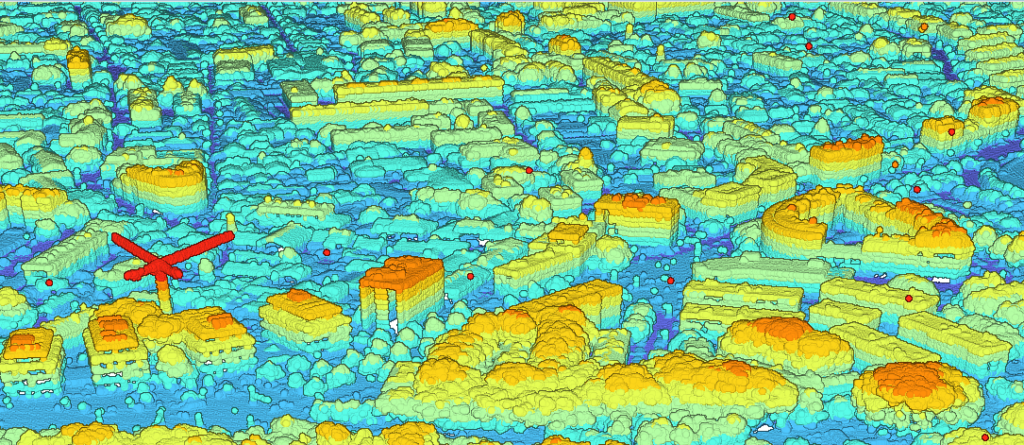
Finally, I used a tool that is used to classify from a raster so as to inject this extraction into the LiDAR point cloud (Figure 4 and Figure 5):
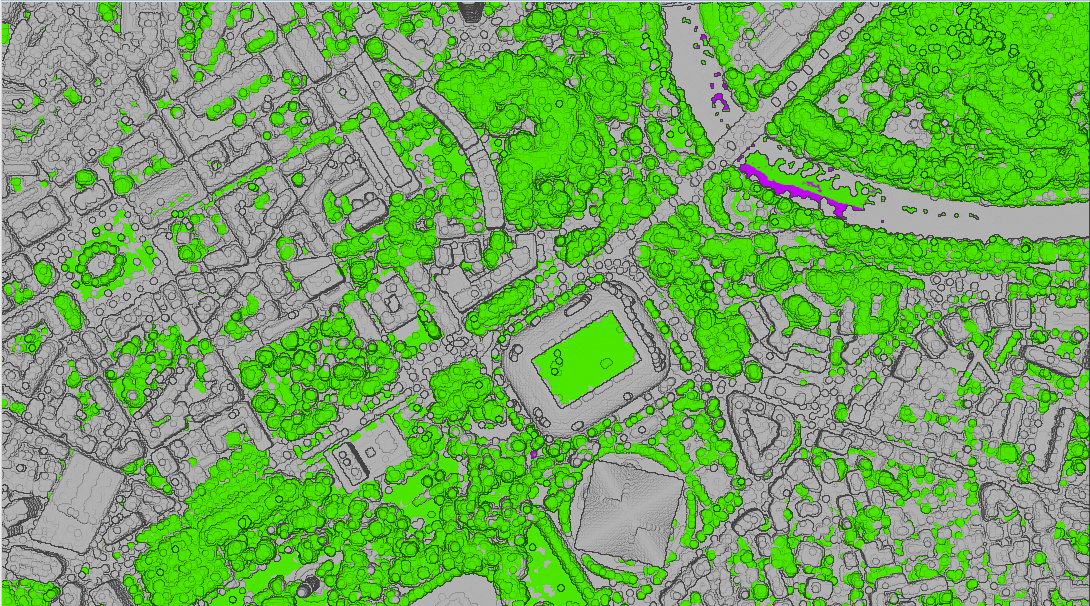 Figure 4. Vegetation in the Grenoble LiDAR point cloud.
Figure 4. Vegetation in the Grenoble LiDAR point cloud.
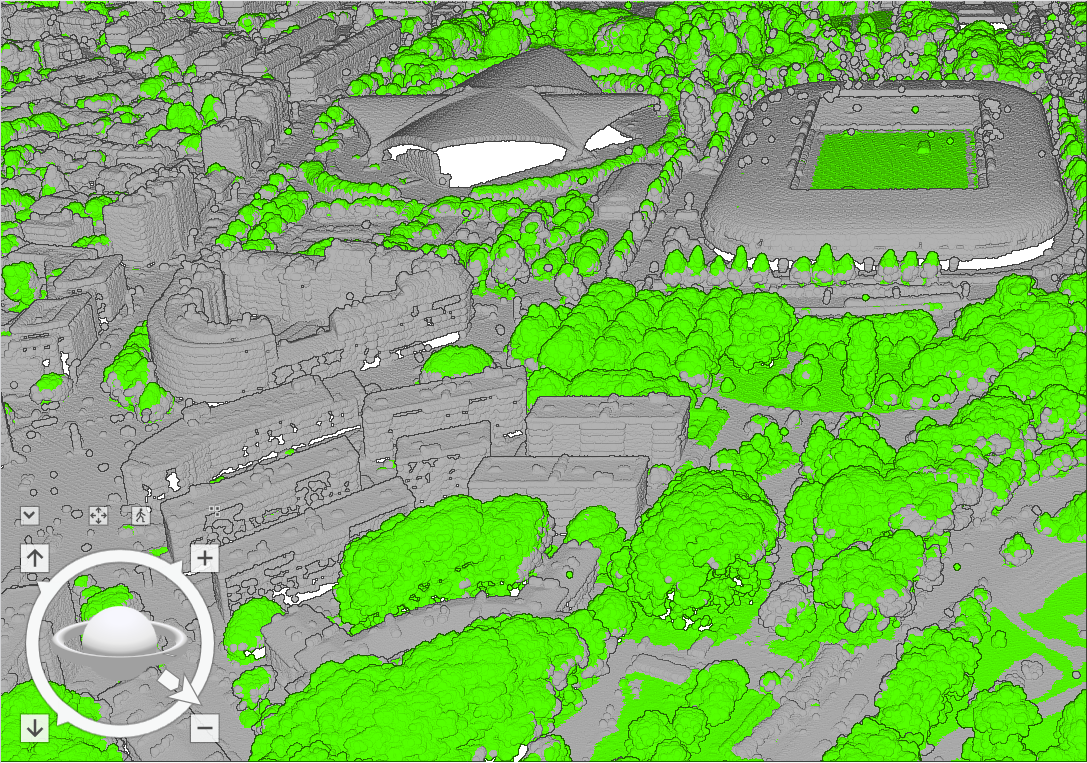 Figure 5. 3D view of the vegetation in the Grenoble LiDAR point cloud.
Figure 5. 3D view of the vegetation in the Grenoble LiDAR point cloud.
Results
Given that the goal was to classify the vegetation, we can consider that it is an accomplished method. However, this is not a fast or automatic method. Indeed, it requires several steps to achieve a result. There now remains the classification of the plant stratum which can be made according to the height – not possible because the algorithm will separate, for example, a tree into several strata when it is only one – or via another algorithm depending on several variables such as height, wavelengths, proximity, etc. Thus, this project is part of a continuity, the perspectives are numerous and could be the subject of a new project.